
![]()
![]()
宋卫堂和李明提出了以“农机-农艺-设施”深度融合提高设施蔬菜机械化水平的思想,从农机研发、农艺和设施协调等角度消除制约设施蔬菜机械化生产的要素,快速提升设施蔬菜的机械化水平。
归结为以下三个步骤:第一步,在调研现有农机装备作业参数的基础上构建以“大垄距+宽沟窄畦”为特征的宜机化、标准化的栽培模式,消除农艺措施对农机作业的限制;第二步,筛选、研发适宜的农机装备,从耕整地、起垄覆膜、移栽到田间管理等全程实现“有机可用、有好机用”的目的,尽可能实现“机器换人”;第三步,改造、建造宜机化的园艺设施结构,使得农机装备能够顺利进出、高效作业,消除设施对农机作业的限制,进一步提高农机作业的便利性。
塑料大棚番茄宜机化模式构建
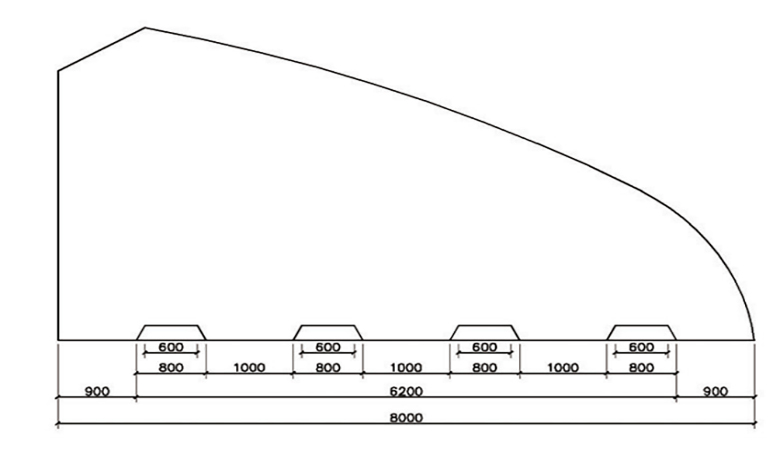
根据番茄栽培作业环节调研现有农机装备作业参数,并据此构建了以“大垄距+宽沟窄畦”为特征的番茄宜机化栽培工艺,即将垄间距由现在的1.3~1.4 m扩大到1.6~1.8 m,形成大垄距;在大垄距的前提下把畦面缩小、垄沟加宽,形成宽沟窄畦。2020年12月7日在江苏大学召开的第一届农机农艺融合研讨会上,来自全国的设施栽培、农机研发、农机企业、技术推广等多领域的专家进行了研讨,推荐了如下番茄栽培的垄形参数:相邻两畦中心距180 cm,畦面高度15~20 cm,垄底宽度80 cm,垄顶宽度60 cm,垄沟宽度100 cm;栽培模式是一垄种植两行,垄上行距30~45 cm,株距根据株数的需要进行调整。以8 m跨度塑料大棚为例,作物栽培垄布置如图所示。
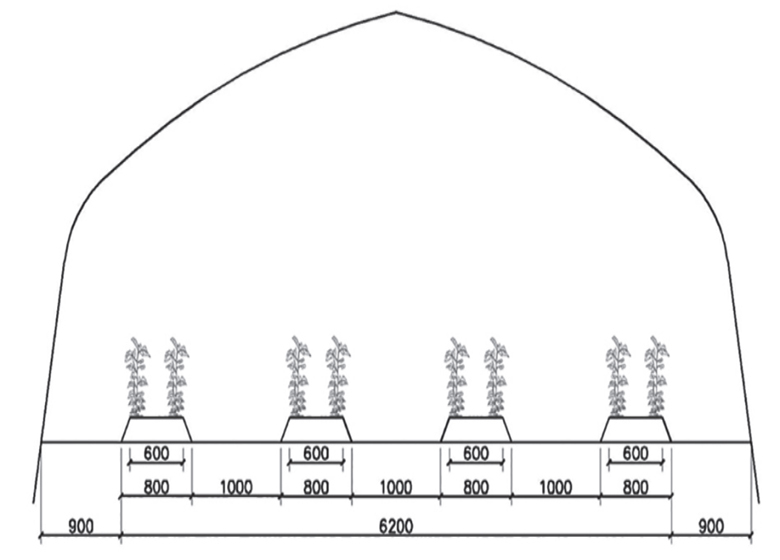
8 m跨度塑料大棚中番茄等果类蔬菜的宜机化栽培示意图/mm
农机装备筛选、改制与研发
为实现主要作业环节“机器换人”,降低劳动强度,提高生产效率和作业质量,通过市场调研,对农机装备进行了筛选,形成了机具配套方案。
主要机械化作业环节及推荐机型

在实践中发现,使用常规起垄覆膜铺滴灌带一体机作业时,由于垄顶为平面,常常发生滴灌带浇水时垄沟积水现象,并且滴灌带的铺设位置距离植株根部较远,会造成水、肥的浪费。为此,团队联合无锡悦田农业机械科技有限公司对YT10系列多功能田园管理机进行了优化改制,使机器起垄时在垄面中间位置上开出一条宽30 cm、深1~2 cm的凹槽,并将两根滴灌带铺放于凹槽两侧,很好地解决了垄沟积水、水肥浪费的问题。

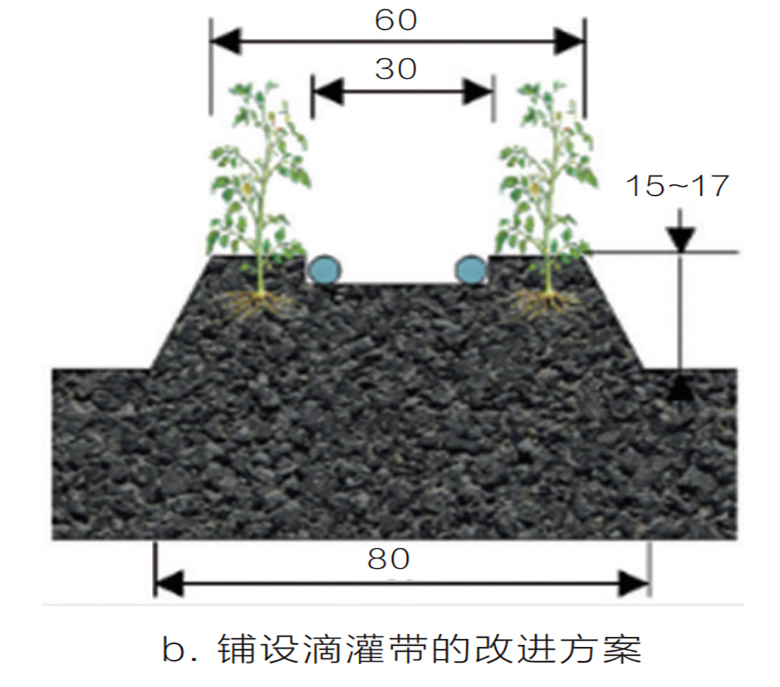
T10系列多功能田园管理机的改进优化/cm
针对塑料大棚物流运输装备缺乏、植保装备主要靠人工背负且存在农药污染人体风险等问题,本团队研发了履带式多功能作业平台,以及“人机分离”式喷雾机。其中,多功能作业平台能够辅助人工进行打杈、吊蔓等植株管理,同时还能辅助采收,即工人站在平台上进行果蔬采摘,果实放置于平台上,并由平台将果实运送出去。这样就可以解决因为大棚长度较长,适宜物流装备缺乏而造成的高强度搬运作业问题,提高工人作业效率、减轻劳动强度。另外,大棚是一个相对密闭的环境,在大棚里喷洒农药,微米级的雾滴会弥散在大棚内部,由于处于无风环境,雾滴难以飘散,会在空气中弥散,易对人体造成危害。“人机分离”式喷雾机,就是使用上述多功能作业平台作为载具,将喷雾系统固定在平台上,同时加装了远程视频系统,作业人员在棚外通过观看屏幕就可以遥控施药作业。这样既降低了劳动强度,提高了作业效率,又可有效防止农药对施药人员的危害。
宜机化的塑料大棚设计
针对现有塑料大棚进出口狭小、室内空间有限的问题,本团队根据农机装备作业的空间需求,综合考虑标准钢管长度、塑料大棚构造要求、土地利用效率等的基础上,设计了一种宜机化塑料大棚。该大棚骨架由两根8.0 m长标准钢管构成,跨度9.5 m,脊高4.5 m,肩高2.2 m,同时在山墙两侧设置了平拉门,方便农机进出。采用上述宜机化栽培模式,室内可栽种5垄番茄。根据行业标准NY/T 1086.6-2016《农业机械化水平评价 第六部分:设施农业》,对采用机械化技术模式后能够达到的技术水平进行评价,塑料大棚番茄生产全程机械化率可从45%提高到88%。
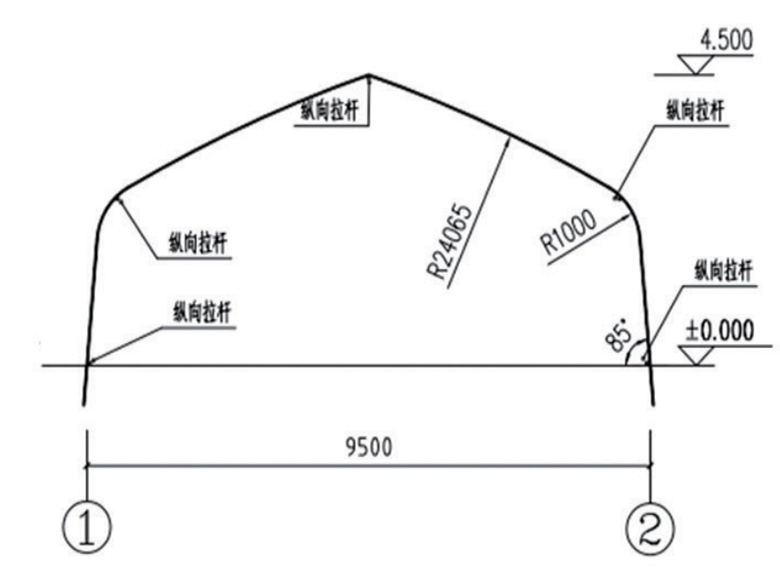
9.5 m跨度宜机化塑料大棚设计图/mm

温州试验站的宜机化塑料大棚实景
日光温室番茄宜机化模式构建
传统日光温室作物栽培垄向多为南北向,不利于农机装备作业。为此,本团队提出将作物栽培垄向由南北向改为东西向,形成了以“大垄距+宽沟窄畦+东西向”为特征的日光温室茄果类蔬菜宜机化栽培参数,即垄底宽80 cm,垄面宽60 cm,垄沟宽100~120 cm,垄高10~20 cm。以跨度8.0 m日光温室为例,跨度方向栽培垄布置模式如图所示。

日光温室中番茄、辣椒、茄子、黄瓜等茄果类蔬菜宜机化栽培参数/cm
8 m跨度日光温室栽培垄示意图/mm
农机装备筛选、改制与研究开发
在采用东西垄向生产的日光温室中,主要机械化作业环节的推荐机型与塑料大棚相同,利用尽可能少的机型来满足多种设施园艺的需求。经过近几年的生产实践验证,推荐机型具有良好的作业效果和比较可靠的性能。
宜机化日光温室改造与设计
对于新建温室,需要进行宜机化设计。即首先根据日光温室宜机化栽培模式,综合考虑温室结构受力特性和日光温室构造要求,确定日光温室的合理跨度,以及主体结构参数,兼顾宜机化栽培下的日光温室土地利用效率;然后根据农机装备作业需求,确定前屋面底角处关键节点的最低高度,再按照日光温室前屋面曲线设计方法确定前屋面曲线,消除传统日光温室前屋面空间狭小对农机作业的限制;最后,传统日光温室出入口狭小,不利于农机装备进出,需要设计相应的进出口。对于已建成的、现有质量较好的日光温室,为避免浪费,一般可将靠近东山墙或西山墙的第一榀或第二榀温室骨架断开,形成一个高度和宽度都约2 m的缺口,作为农机装备的进出口。根据行业标准NY/T 1086.6-2016《农业机械化水平评价 第六部分:设施农业》以及实际应用验证,该日光温室番茄生产机械化技术模式可使全程机械化率从33%提高到72%。
在示范设施番茄的机械化生产技术模式过程中,“宽沟窄畦”栽培模式也出现了一些新问题。日光温室中,同一垄内北侧行相较于南侧行果实偏小、产量偏低;北侧行的叶片有黄化早衰现象。塑料大棚中,同一垄两行中间的叶片有黄化早衰现象。产生这种现象的原因是由于垄内两行之间光照不足、通风不良。为此,本团队从工程技术角度,提出了两项可用于改善垄内行间光照条件的技术。一是日光温室和塑料大棚采用散光膜进行覆盖,太阳光经过散光膜发生散射,会有部分光线进入行间,改善光照环境;二是“动态行距”技术,当农机不进入垄沟时,垄上两行茎蔓之间的距离变大,当农机要进入垄沟时,垄上两行茎蔓之间的距离变小,也就是同一垄上两行植株茎蔓之间的距离,要随着农机是否进入垄沟,进行动态改变。为实现“动态行距”,设计了一种行距调整机构,植株正常生长状态下,人或者农机具不进入行间,两行打开利于植株采光和行间通风,当人或者农机具要进入行间时,两行收拢。
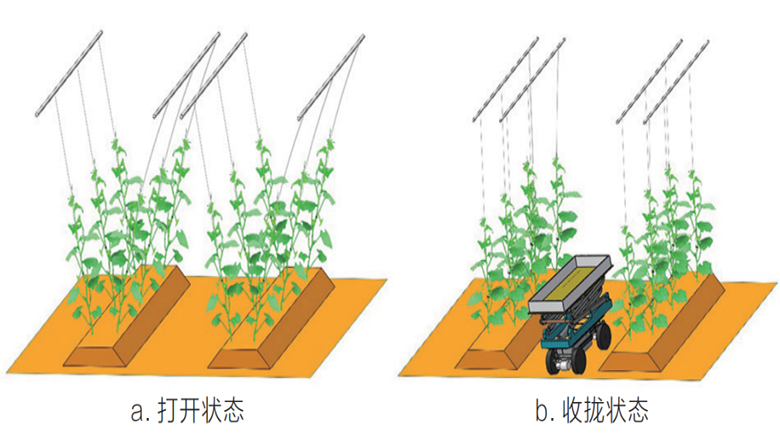
果菜行距动态调整机构示意图
